Moorings: The workhorse of the RAPID project by Matt Clark
Posted on June 6, 2020
The RAPID project relies on an array of moorings at 26N: anchored lengths of rope or wire with various scientific instruments attached at specific points. These moorings are left anchored for around 18 months before being recovered on the next cruise. Moorings vary in size and composition depending on where they are deployed and what we aim to measure. Apart from seabed lander platforms, RAPID’s shortest moorings are about 600m and the longest are over 5000m long. RAPID recovers and replaces these moorings approximately every 18 months.
Moorings are always deployed and recovered top-first. On deployment, the ship goes forward slowly, at about half a knot, allowing the mooring to stream behind. The bridge and deck crew are in constant radio communication. Once at the release location, the bridge radios the deck crew, who drop the anchor.
An intro to instruments
SBE MicroCAT: MicroCATs form the basis of RAPID measurements. They are a small CTD (conductivity-temperature-depth) instrument, which record a measurement every hour. MicroCAT-ODO is an upgraded version with an extra oxygen sensor mounted, which records hourly dissolved oxygen content. MicroCATs provide us with a time series of changes of salinity and temperature at the depth they are placed.

Current meters: There are two types of current meter used on the RAPID project. They record the eastward and northward components of water velocity every hour. This allows us to measure the currents at different water depths.

Bottom pressure recorder: does what it says on the tin (records the pressure at the bottom of the ocean). These are mounted at the base of a lander. Remote Access Sampler (RAS): These are automated water sampling instruments, which are put on a four moorings. Typically deployed in the surface layers, they take water samples every 12 days to be analysed for dissolved inorganic carbon, nutrients and total alkalinity on recovery. They also have a MicroCAT-ODO mounted on the frame too.

More on moorings...
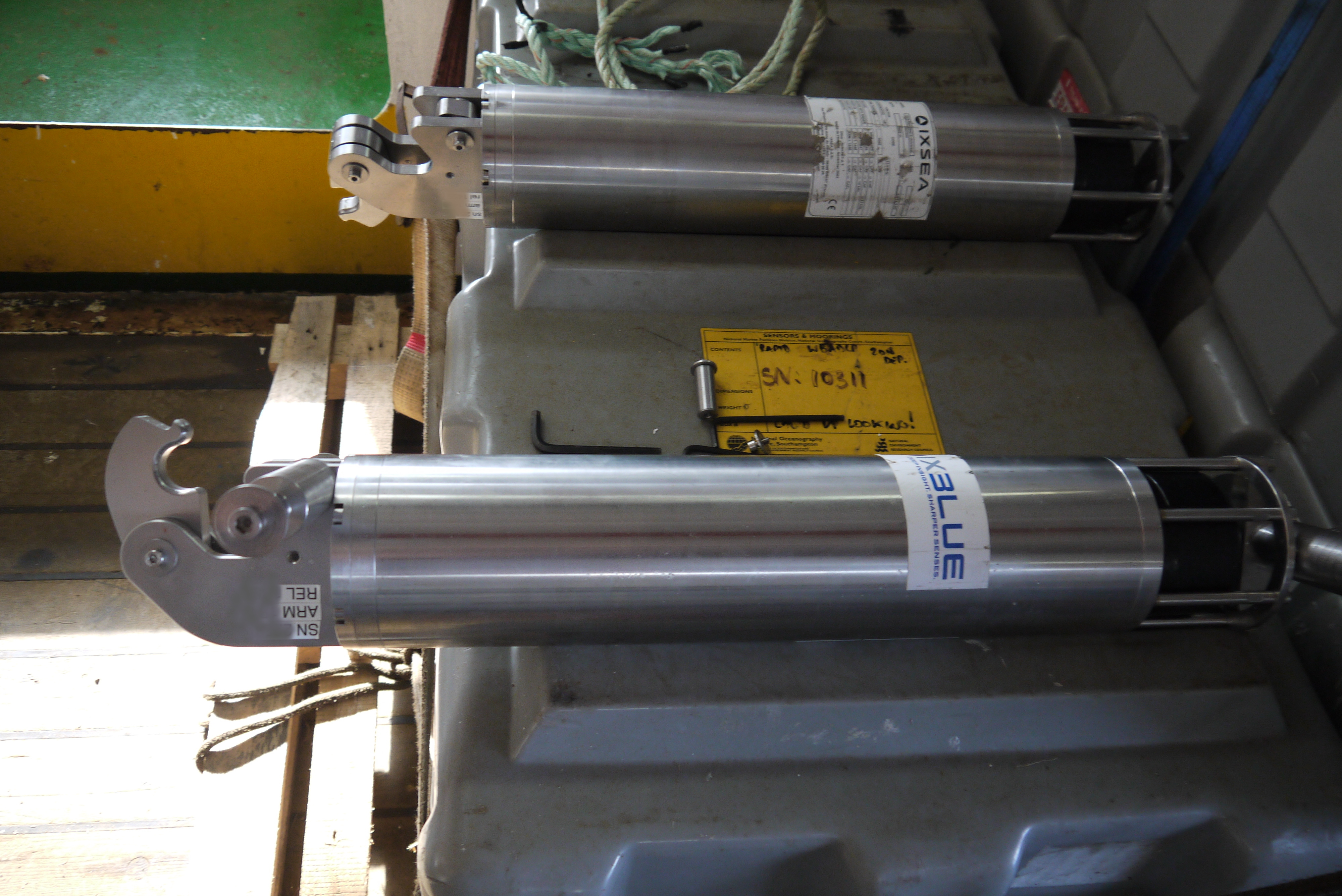
A mooring wouldn’t be able to be recovered without a way to release it from it’s anchor. To do this, we use an acoustic release. Essentially, these are an automated hook. When the correct acoustic signal is sent by a hull-mounted transducer on the ship and received by the release, a motor on the release activates. This lets the hook that holds the anchor swing open. The installed buoyancy, provided by glass spheres in a rigid plastic “hat”, makes the mooring rise to the surface where it is grappled and recovered to deck.

Finally, we come to anchors. You might be imagining something that looks like a ship’s anchor, but usually it’s just a big and heavy length of chain. Weight of the anchor is adjusted depending on the height of the mooring and the strength of the ocean currents. On our recent 5000m mooring EB1, an anchor of 1400Kg was used.
All photos: Matt Clark
Back to top ↑ Blog Home Website Home